

SMART ROBOT BLUETOOTH CAR with ARDUINO
.
Hai sedulur jogjarobotika, kali inijogjarobotika akan sharing tentang suatu project arduino. Nah project kali ini saya akan mencoba membuat robot beroda yang terkoneksi dengan bluetooth. Jadi robot ini akan saya kendalikan menggunakan smartphone yang terkoneksi dengan bluetooth.
.
Oke langsung saja kita siapkan bahan-bahannya.
.
1. Sasis Kit A30
Disini saya menggunakan SMART CAR CHASSIS KIT A30.Chasis Kit ini menggunakan bahan aluminium, jadi lebih kuat. sasis ini dapat digunakan untuk berbagai project arduino seperti robot line follower, robot beroda terkoneksi bluetooth, robot light follower, obstacle avoiding robot, dan lain sebagainya.
Sasis kit ini terdiri dari rangka body, motor dc, roda berdiameter 65mm, dan roda frewheel.
.
2.Arduino
Seperti biasa, untuk project kali ini pun saya memakai arduino UNO sebagai kontrolernya.
.
3. L298P MOTOR DRIVER SHIELD FOR ARDUINO
Kemudian saya menggunakan L298P MOTOR DRIVER SHIELD untuk mengontrol putaran dan kecepatan motor. Driver ini merupakan yang paling sering digunakan karena memiliki kelebihan yaitu dalam hal kepresisian dalam mengontrol motor sehingga motor lebih mudah untuk dikontrol.
.
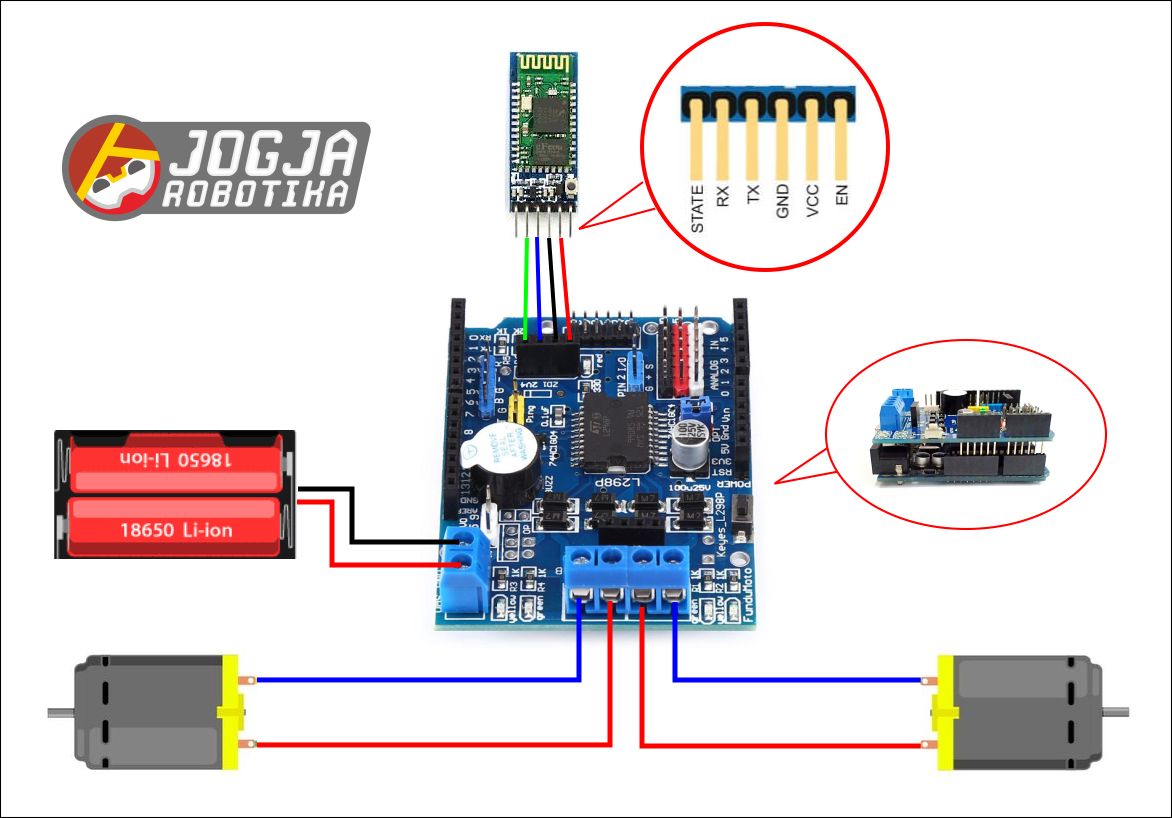
4. Modul Bluetooth HC-05
Bluetooth HC-05 adalah sebuah perangkat komunikasi wireless yang menggunaka sinyal bluetooth. Bluetooth HC-05 ini memiliki kelebihan yaitu mode master dan slave dapat di tukar. Bluetooth HC-05 ini yang bertugas menghubungkan komunikasi data dari smartphone ke Arduino.
.
5. Box Baterai + Baterai LI-ION 3.7V ukuran 18650
.
6. Beberapa Kabel Jumper dan Baut
.
Seperti biasa,jangan lupa beli bahan-bahan lengkap nya di jogjarobotika.com
.
Langsung saja mulai kita rakit robotnya.
.
.
1. Rakitlah terlebih dahulu motor dc yang sudah disolder kabel pada konektor motornya.
2. Pasang kedua roda diameter 65mm dan freewheelnya.
3. Pasang arduino.
4. Pasang L298P MOTOR DRIVER SHIELD. Lalu koneksikan kabel motor ke L298P MOTOR DRIVER SHIELD tersebut.
5. Pasang box batre. Lalu koneksikan kabel output dari box batre atau kabel power ke konektor power di L298P motor driver shield.
6. Pasang Modul Bluetooth HC-05 di pin rx tx di L298P MOTOR DRIVER SHIELD. Kemudian pasang baterai yang terakhir, koneksikan arduino ke PC dan upload program ke arduino.
.
Program nya adalah seperti berikut:
.
.
#include <SoftwareSerial.h>
SoftwareSerial mySerial(0, 1); // RX, TX
#define m1 12 //logic
#define m2 10 //pwm
#define m3 13 // logic B
#define m4 11 //PWM B
int data=0,kec=0;
int fast[11]={0,80,100,120,140,160,180,200,220,240,255};
int buzzer = 4;
void setup()
{
pinMode(m1,OUTPUT);
pinMode(m2,OUTPUT);
pinMode(m3,OUTPUT);
pinMode(m4,OUTPUT);
pinMode(buzzer, OUTPUT);
// for HC-05 use 38400 when poerwing with KEY/STATE set to HIGH on power on
mySerial.begin(9600);
}
void motorOut(unsigned char lpwm, unsigned char rpwm, boolean arrow){
//arrow=false=forward; arrow=true=backward;
if(arrow==false){
digitalWrite(m3,HIGH);
digitalWrite(m1,LOW);
analogWrite(m4,lpwm);
analogWrite(m2,rpwm);
}
else{
digitalWrite(m3,LOW);
digitalWrite(m1,HIGH);
analogWrite(m4,lpwm);
analogWrite(m2,rpwm);
}
}
void loop(){
if(mySerial.available()>0){
data=mySerial.read();
// kec=data;
if (data =='0') { kec=0;}
else if (data =='1') { kec=1;}
else if (data =='2') { kec=2;}
else if (data =='3') { kec=3;}
else if (data =='4') { kec=4;}
else if (data =='5') { kec=5;}
else if (data =='6') { kec=6;}
else if (data =='7') { kec=7;}
else if (data =='8') { kec=8;}
else if (data =='9') { kec=9;}
else if (data =='q') {kec=10;}
if (data == 'S')
{
motorOut(0,0,false);
}
if(data=='F')
{
motorOut(fast[kec],fast[kec],true);
}
if (data=='I')
{
motorOut(fast[kec],((fast[kec])/2),true);
}
if (data=='G')
{
motorOut(((fast[kec])/2),fast[kec],true);
}
if(data=='R')
{
motorOut(fast[kec],0,true);
}
if(data=='L')
{
motorOut(0,fast[kec],true);
}
if(data=='B')
{
motorOut(fast[kec],fast[kec],false);
}
if (data=='H')
{
motorOut(((fast[kec])/2),fast[kec],false);
}
if (data=='J')
{
motorOut(fast[kec],((fast[kec])/2),false);
}
if (data == 'V')
{
digitalWrite(buzzer, HIGH);
}
if (data == 'v')
{
digitalWrite(buzzer, LOW);
}
}
}
.
.
.
Setelah upload program, langsung saja kita tes robotnya. Tapi sebelumnya silahkan download software
nya terlebih dahulu Bluetooth RC Controller di playstore.
Setelah selesai install, langsung saja kita coba koneksikan dan jalankan robot nya.
.
Ya demikian tadi project simple dari kami. Semoga menjadi ilmu yang bermanfaat. Silahkan saran dan komen di bawah sebagai masukan untuk kami.
.
Video tutorial lebih lengkap dapat dilihat di youtube channel kami. Klik disini
.
Terima kasih. Salam jogjarobotika
.
.
*Note: Saat download program ke arduino, L298P MOTOR DRIVER SHIELD FOR ARDUINO harus dilepas terlebih dahulu
Comments
Leave your comment